Physics (fr)
Le moteur physique Box2D
Le moteur physique Box2D peut être utilisé afin de développer des applications qui utilisent des phénomènes physiques, comme la gravité ou des collisions entre objets (avec énergie, vitesse, etc.). Ce moteur est écrit en C++ et est en quelque sorte indépendant de la librairie gdx2d. Si vous êtes intéressé(e), vous trouverez plus d’informations sur ce moteur physique sur http://box2d.org/. Ce document présente uniquement les principes de fonctionnement sans aller dans le détail.
Les objets physiques
Différents objets physiques (statiques ou dynamiques) sont à disposition et peuvent être utilisés directement. De manière générale, on va simuler principalement des cercles et des rectangles, parfois des polygones.
Les classes correspondantes que vous allez utiliser sont :
-
PhysicsBoxetPhysicsStaticBoxqui représentent des rectangles. -
PhysicsCircleetPhysicsStaticCirclequi représentent des cercles.
Ces objets de base possèdent différentes caractéristiques physiques comme taille, moment, densité, coefficient de frottement etc… La taille et les positions de ces objets sont spécifiées en pixels. Une fois crées, ils sont ajoutés automatiquement dans le monde physique PhysicsWorld.
Principe de fonctionnement
Le moteur physique va simuler les mouvements des objets en fonction des forces existant dans le monde. Une force existant par défaut est la gravité (qui peut être modifiée bien entendu). Celle-ci va influencer tous les objets (par exemple, un rectangle dans l’air tombera). On peut également créer des forces pour agir à différent endroits sur les objets. Observez les différentes démos à disposition pour vous faire une idée de ce que l’on peut faire (notamment dans la démo DemoPhysicsRocket).
Un premier exemple

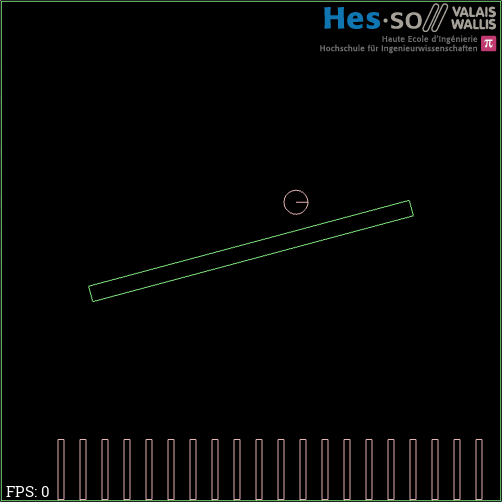
L’application DemoSimplePhysics, présentée dans la figure ci-dessus, utilise le moteur physique Box2D et montre comment réaliser une simulation. Les applications physiques sont composées des objets suivants :
-
PhysicsWorld: le monde unique dans lequel les objets physiques sont ajoutés pour être simulés. La méthodesetGravitypermet par exemple de spécifier une gravité terrestre. C’est cette classe qui fera la simulation physique à proprement parler. -
DebugRenderer: permet de dessiner les contours des objets physiques, lorsque ces derniers ne possèdent pas de texture (modedebug). Les objets dont la position est fixe (qui ne bougent jamais) sont dits statiques et sont dessinés en vert par leDebugRenderer. - La classe
PhysicsScreenBoundariespeut être utilisée afin de limiter automatiquement le monde physique à la taille de la fenêtre. Par défaut, les collisions sont activées entre tous les objets.
Pour cette application, la méthode de dessin est la suivante :
-
@Override public void onGraphicRender(GdxGraphics g) { g.clear(); debugRenderer.render(world, g.getCamera().combined); PhysicsWorld.updatePhysics(); g.drawSchoolLogoUpperRight(); g.drawFPS(); } -
override def onGraphicRender(g: GdxGraphics): Unit = { g.clear() debugRenderer.render(world, g.getCamera.combined) PhysicsWorld.updatePhysics() g.drawSchoolLogoUpperRight() g.drawFPS() }
Elle consiste à faire le rendu du monde physique à l’aide de la classe DebugRenderer, puis de recalculer la position des objets du monde en utilisant la méthode updatePhysics.
Dessin des objets physiques avec textures
La classe DebugRenderer permet de dessiner le contour des objets physiques automatiquement. Il est possible d’ajouter une texture à ces objets en dessinant périodiquement une image à la position actuelle des objets. Pour ce faire, les objets du monde doivent être sauvegardés dans une liste, comme le montre l’exemple suivant :
-
// List of physics objects available in the world LinkedList<AbstractPhysicsObject> list = new LinkedList<AbstractPhysicsObject>(); BitmapImage img; @Override public void onInit() { img = new BitmapImage("data/images/soccer.png"); // Load the circle texture // Create and add circles to the world list.add(new PhysicsCircle(null, new Vector2(250, 500), 30)); list.add(new PhysicsCircle(null, new Vector2(150, 500), 40)); } @Override public void onGraphicRender(GdxGraphics g) { g.clear(); // No longer required // debugRenderer.render(world, g.getCamera().combined); // Draw every body in the world for (Iterator<AbstractPhysicsObject> it = list.iterator(); it.hasNext(); ) { AbstractPhysicsObject c = it.next(); Float radius = c.getBodyRadius(); Vector2 pos = c.getBodyPosition(); g.drawTransformedPicture(pos.x, pos.y, c.getBodyAngleDeg(), radius, radius, img); c.setBodyAwake(true); } PhysicsWorld.updatePhysics(); } -
// List of physics objects available in the world var list: ArrayBuffer[AbstractPhysicsObject] = ArrayBuffer.empty var img: BitmapImage = _ override def onInit(): Unit = { img = new BitmapImage("data/images/soccer.png") // Load the circle texture // Create and add circles to the world list += new PhysicsCircle(null, new Vector2(250, 500), 30) list += new PhysicsCircle(null, new Vector2(150, 500), 40) } override def onGraphicRender(g: GdxGraphics): Unit = { g.clear() // No longer required // debugRenderer.render(world, g.getCamera.combined) // Draw every body in the world for (c <- list) { val radius = c.getBodyRadius val pos = c.getBodyPosition g.drawTransformedPicture(pos.x, pos.y, c.getBodyAngleDeg(), radius, radius, img) c.setBodyAwake(true) } PhysicsWorld.updatePhysics() }
Ainsi, il n’est plus nécessaire de dessiner le DebugRenderer.
Destruction des objets physiques
Il est important de détruire les objets physiques qui ne sont plus utilisés (par exemple
lorsque ces derniers sont en dehors de la fenêtre) à l’aide de la méthode destroy. De même si vous voulez enlever un objet de la simulation (par exemple s’il est détruit) il est important de prendre quelques précautions.
Pour ce faire, le code suivant peut être utilisé :
-
List<PhysicsBall> balls = new LinkedList<PhysicsBall>(); // balls.add(new PhysicsBall(...)); @Override public void onGraphicRender(GdxGraphics g) { g.clear(Color.LIGHT_GRAY); // Draws the balls for (Iterator<PhysicsBall> iter = balls.iterator(); iter.hasNext(); ) { PhysicsBall ball = iter.next(); ball.draw(g); Vector2 p = ball.getBodyPosition(); // If a ball is not visible anymore, it should be destroyed if (p.y > height || p.y < 0 || p.x > width || p.x < 0) { ball.destroy();// Mark the ball for deletion when possible iter.remove();// Remove the ball from the collection as well } } g.drawString(5, 30, "#Obj: " + world.getBodyCount()); PhysicsWorld.updatePhysics(); } -
val balls: ArrayBuffer[PhysicsBall] = ArrayBuffer.empty balls += new PhysicsBall(...) override def onGraphicRender(g: GdxGraphics): Unit = { g.clear(Color.LIGHT_GRAY) // Draws the balls for (i <- 0 until balls.length) { val ball = balls(i) ball.draw(g) val p = ball.getBodyPosition() // If a ball is not visible anymore, it should be destroyed if (p.y > height || p.y < 0 || p.x > width || p.x < 0) { ball.destroy() // Mark the ball for deletion when possible balls.remove(i) // Remove the ball from the collection as well } } g.drawString(5, 30, "#Obj: " + world.getBodyCount()) PhysicsWorld.updatePhysics() }
Groupes de collisions
Des groupes de collisions peuvent être mis en place afin d’activer ou désactiver les collisions entre des objets physiques de même type. Pour ce faire, la méthode setCollisionGroup est disponible pour tous les AbstractPhysicsObject :
-
PhysicsCircle b = new PhysicsCircle(null, new Vector2(x, y), 30); b.setCollisionGroup(-2); PhysicsBox box = new PhysicsBox(null, new Vector2(x, y), 30, 30); box.setCollisionGroup(1); -
var b: PhysicsCircle = new PhysicsCircle(null, new Vector2(x, y), 30) b.setCollisionGroup(-2) var box: PhysicsBox = new PhysicsBox(null, new Vector2(x, y), 30, 30) box.setCollisionGroup(1)
Un identifiant négatif permet de désactiver les collisions entre les objets du même type. Dans cet exemple, les collisions entre les cercles sont désactivées. Toutes les autres collisions (box contre box et box contre cercles) restent actives.
This page is generated from GitHub.